Urban virtual environment landscape design and system based on PSO-BP neural network

The development and realization of the development mode, theoretical research, and application examples of virtual landscape research can provide a forward-looking reference for the practice of neural network technology in the field of landscape.
Overview of neural networks
The usefulness of an artificial neural network usually lies in the fact that it corresponds to a function or benchmark. A neural network consists of a large number of interconnected neurons, each of which is responsible for implementing a specific output function, called an activation function. Signals between neurons are weighted using connection weights, which determine the need to create an artificial neural network memory. The difference between different neural networks is the choice of network24. For example, how neurons are connected and what firing function they have.
An artificial neural network is a nonlinear, accommodate an extensive range of message handling devices. It uses lots of artificial neurons to connect each other, processes and stores information by imitating the way the brain’s neural network works. It leverages the findings of modern neuroscience research to support its ability to respond and process input signals25.
Like neural networks in the brain, the basic building blocks of artificial neural networks, no matter how complex, are artificial neurons, or neurons for short. Neurons can process information, have memory, and work in parallel with other neurons to form neural networks. An artificial neuron is a mathematical model of a biological brain neuron visualized with mathematical tools. The artificial neuron composition model is shown in Fig. 1.

Model of artificial neurons.
Among them, xi is the input vector component, ωi is the weight, f is the transfer function, θ is the threshold, and y is the output vector.
The basic model of neurons can be expressed mathematically as follows:
$$u_k=\sum_i=1^xW_ikM_i$$
(1)
$$n_k=f\left(u_k+b_k\right)$$
(2)
In the Formula, Mi is the input data imported before neural network training, and Wik is the synaptic weight of neuron k.
The commonly used activation functions mainly have the following three forms, among which are:
$$\textV=\textu_\textk+\textb_\textk$$
(3)
The first is a threshold or step function. If the argument of the function is less than zero, it indicates that the output of the function is zero. Conversely, when the function’s argument is not less than 0 (including greater than and equal to zero), the output of the function is 1.
$$\textf\left(\textv\right)=\left\{\beginarrayc1,\text v\ge 0\\ 0,\text v<0\endarray\right.$$
(4)
The second is a linear piecewise function. The amplification factor of the piecewise function in the (− 1,1) linear region is a fixed value, and the activation function of this mode is usually regarded as a nonlinear amplifier26.
$$\textf\left(\textv\right)=\left\{\beginarrayc1,\text v\ge 1\\ \textv, -1<\textv<1\\ -1,\text v\le -1\endarray\right.$$
(5)
It can be seen from the above Formula that the piecewise linear function is equivalent to a linear amplifier with a certain amplitude. In the normal linear region of the formula, the magnification can be set according to different application scenarios.
The third type is the nonlinear transfer function. This is a neuron model with state loops. One-way function curves are one of the most commonly used nonlinear transfer functions and are often referred to as sigmoid functions to explain such functions. The unipolar sigmoid function is defined as:
$$\textf\left(\textv\right)=\frac11+\texte^-\textv$$
(6)
Similar to a unipolar sigmoid, it is sometimes in the form of a bipolar sigmoid or hyperbolic tangent, namely:
$$\textf\left(\textv\right)=\frac21+\texte^-\textv-1$$
(7)
$$\textf\left(\textv\right)=\frac1-\texte^-\textv1+\texte^-\textv$$
(8)
Learning methods are an important aspect in the development of artificial neural networks. During the learning process, the weights of the connections in the network are mainly changed, which means that the learning process is a process of weight transfer. The main learning methods of neural networks are rewarded learning, supervised learning and unsupervised learning. Unsupervised learning is only a simple imitation of the input information from the outside world, and it simply relies on the surface rules of the input data to adjust the network weights. There is no feedback mechanism and no weight correction. Supervised learning is similar to the process of tutors teaching professions, and tutors appear in the system as a supervision mechanism. The biggest difference between reward learning and the other two learning mechanisms is that the prediction results of reward learning do not use the measured data to do error analysis to adjust the self-learning mechanism of system parameters27,28. The supervised learning structure diagram is shown in Fig. 2.

Supervised learning structure diagram.
BP neural network is trained by supervised learning method and back-propagation algorithm (BP algorithm). It can be trained repeatedly and has the ability of memory and prediction. The training steps are as follows.
Through network initialization, the BP neural network determines the number of neurons in the input layer y and the number of neurons in the output layer x according to the number of input set elements in the input scheme and the number of output set elements in the output scheme. It is generally determined by random assignment or model trial calculation29.
The output values of hidden layer, the input vector of the input layer of the BP neural network, the weight of the link from the input and hidden levels, the hidden level throw, and the output value of the hidden layer are solved:
$$H_j=f\left(\sum_i=1^yw_ijm_i-b_j\right)$$
(9)
Among them, j = 1,2,3,…,l, f(t) is the hidden layer’s function of enlargement and l is the node count of the hidden layer.
The predicted output value is solved, and the predicted output value of the neural network is solved according to the previous step:
$$O_k=\sum_j=1^lH_jw_jk-b_k$$
(10)
Among them, k = 1,2,3,…,x.
By calculating the error, the predicted output value obtained is compared with the actual value, and the measured error value is calculated. The formula is as follows:
$$e_k=N_k-O_k$$
(11)
According to the obtained error value, the update weight formula is as follows:
$$w_ij=w_ij+\mu H_j\left(1-H_j\right)m\left(i\right)\sum_k=1^xw_jke_k$$
(12)
$$w_jk=w_jk+\mu H_je_k$$
(13)
According to the error value, update the threshold, the formula is as follows:
$$b_j=b_j+\mu H_j\left(1-H_j\right)\sum_k=1^xw_jke_k$$
(14)
$$b_k=b_k+e_k$$
(15)
It is necessary to judge whether the training iteration is over. If it is not over, it is required to return to the step of solving the output value of the hidden layer.
The particle swarm optimization (PSO) algorithm is based on the study of the behavior of birds of prey. The basic idea is to find an optimal solution through human-to-human cooperation and information exchange. The algorithm differs from the Genetic Algorithm in that it reduces complex coding, crossover and mutation operations, but is otherwise similar to the Genetic Algorithm. Unlike genetic algorithms, which require complex parameter tuning, particles are searched around the solution space, which makes implementation simpler and convergence faster30.
The particle swarm optimization (PSO) algorithm is discovered through a simulation of a simplified social model. By observing many phenomena in nature, there are many organisms such as birds, fish, etc. that have a certain group behavior of group living habits31. Unlike the simple rules of individual behavior, collective behavior is very complex and unpredictable. There are many striking contrasts that can be drawn from looking at complex group movements. The behavior of an individual and its neighbors are inseparable, and each individual must abide by the following three principles: to avoid collision, each individual must avoid colliding with its neighbors; to maintain the same speed, the average speed of the individual and its neighbors must be the same; to move toward the center, each individual must move toward the center of its neighbors.
The particle swarm optimization algorithm considers each individual particle swarm to be a massless and volumeless particle, moving with a certain velocity in the y-dimensional search space. The calculation formula is as follows:
$$v_ij\left(t+1\right)=v_ij\left(t\right)+c_1r_1\left(p_j\left(t\right)-m_ij\left(t\right)\right)+c_2r_2\left(g_j\left(t\right)-m_ij\left(t\right)\right)$$
(16)
$$m_ij\left(t+1\right)=m_ij\left(t\right)+v_ij\left(t+1\right)$$
(17)
Among them, e vij(t) is the velocity of the particle, mij(t) is the current particle position, pj(t)(p best(t)) and gj(t)(g best(t)) is a perfect place for each individual and a group respectively, and c1 and c2 are called learning factors. The principle of particle movement is shown in Fig. 3.

Principle of particle movement.
This diagram illustrates the principle of how the motion of a particle is transferred from a given position to two dimensions by a formula. In other words, the first part of the formula is the memory term, that is, the magnitude and direction of the final velocity. The second part is the vector from the point at the current position to the optimal point of the particle itself, called the self-perception term. The third part is the crowd-aware term, which is the vector from the current point to the best point of the crowd. Particles decide what to do next based on their own experience and that of other particles. Humans also decide what to do by analyzing and interpreting information, as do particles32.
This article chooses the PSO-BP neural network model based on its advantages and applicability in solving urban landscape design challenges. PSO-BP neural network combines the characteristics of particle swarm optimization (PSO) and back propagation (BP) algorithms. It may surpass the conventional BP neural network, find better answers to complicated issues, and do both local and global searches. The network readily settles into the area’s optimal solution, enhancing the model’s accuracy and performance.
The PSO-BP neural network has the following advantages over other alternative models:
-
1.
The PSO-BP neural network can continually optimize and iterate the model during the training phase, increasing its accuracy and helping it better respond to complicated scenarios and modifications in urban landscape design.
-
2.
The PSO-BP neural network has a high computational cost, but because of its advantages in both local and global search, it may discover the optimal solution quickly, which increases design efficiency.
-
3.
In regard to adaptability, the PSO-BP neural network model has significant adaptability and versatility, can handle jobs involving urban landscape design of varying scales and complexity, and can be easily altered and enlarged in accordance with particular challenges and needs.
Through mechanized and optimized design methods, this research incorporates the PSO-BP neural network to dramatically alter the conventional urban landscape design strategy. The PSO-BP neural network improves the accuracy and efficiency of design through data-driven design optimization, and can quickly generate landscape plans that meet user needs. In terms of urban aesthetics, according to the characteristics of different urban environments, the landscape color and layout are optimized to enhance the city’s historical sense and cultural atmosphere and improve the overall visual effect. At the same time, the efficient processing capabilities and flexible adaptability of the PSO-BP neural network help achieve efficient land use and rational allocation of green space, thereby promoting the goal of sustainable urban development and creating a more beautiful, livable and sustainable city. Urban environments offer new avenues.
Overview of urban virtual environment landscape
The concept of landscape is formed by people developing the spatial sense of landscape in the long-term survival process. This concept has different interpretations in different disciplines. Aesthetic artists regard the landscape as the object of the visual aesthetic process corresponding to the landscape. Geographers view landscape as a scientific concept, defined as a part of the space or topography on the Earth’s surface. Ecologists view the landscape as an organic ecosystem with strong connections between interior and exterior, structure and function. Landscape is a complex natural evolution process and human activities on the earth. It is not only natural and ecological, but also a cultural landscape. It is a comprehensive reflection of the social economy, culture and human ideology of a period, and it is a material form of social form33.
The urban landscape is the visual image of the city reflected by the interaction of natural evolution and human activities within the scope of the city. In other words, human activities have penetrated every inch of the world, and cities are the greatest creations of human activities. A city is a large community where people live together in the name of a common faith. At the same time, all the necessities of life are transferred to the land called the city, hence the name urban landscape.
There are two main ways to form urban landscape: natural evolution and controlled guidance. The mechanisms implemented by the two methods and the resulting results are quite different. The natural evolution of the urban landscape mainly acts in the early stage of the evolution of human civilization. The control and guidance of the urban landscape is contrary to the mode of natural evolution, which is dominated by the control and guidance of human will.
A city is a product of the development of human history, and its content, form, structure, style and other aspects deeply reflect some features of different historical periods, thus showing the urban landscape of different historical periods. Historically, urban landscapes can be divided into ancient, modern, contemporary and modern urban landscapes34.
The urban streetscape is like the eyes of the urban landscape. Therefore, it is the most vital element in the urban landscape space, the most important part of the urban landscape space, the carrier for the most concentrated display of the city image, and the most direct medium for reflecting the urban regional culture. In this sense, the street environment landscape is still a kind of cultural precipitation.
The urban streetscape is far more than the specific objects including buildings, ground paving, public environmental facilities and other objects, but more importantly is the connotation of urban society, culture and history. The result of the interaction between the two can be called the real urban street environment landscape. Then, different geographical environments and differences in customs make the streets of different regions present their own individual characteristics.
The theory of urban characteristics refers to injecting the idea of “urban characteristics” into urban planning and design to guide the creation of a characteristic urban space environment. Urban characteristics are the concentrated expression of the physical material form, historical context and economic development complex of a city within a certain time and space, and are obviously different from other cities. It is composed of physical and non-material environmental characteristics, and is the core soul of a city. Then, the urban characteristic design should be summed up firstly to excavate and explore the urban characteristic resources, understand the formation, composition and transformation characteristics of the characteristic resources, and establish a connection with the design of the urban characteristic physical material space environment35.
Under this big theoretical background, the theory of urban characteristics strongly supports the personalized design of the urban street environment landscape, and provides a favorable resource basis for the “individual” expression of the street landscape. At the same time, the “personality” of urban streets is a direct attribute of urban characteristics, which reflects the accumulation of material and non-material connotations in a certain area and a certain period of time36.
Virtual reality is an evolving technology supported by many disciplines. As science and technology advance, it provides a great opportunity to help users explore issues related to resources, the environment, and the various demands of globalization and historical processes.
Virtual environment has extensive applications and is of great significance in urban landscape design.
-
1.
The virtual environment provides a platform to simulate real scenes, in which designers verify different design plans, including buildings, roads, greening, etc., allowing designers to evaluate the effect of the design before actual construction and avoid unnecessary errors and costs.
-
2.
The virtual environment is used to allow users to participate in the process of urban landscape design. Through virtual reality technology, users can personally experience different design solutions and provide feedback. Designers can better understand user needs and design urban landscapes that better meet people’s expectations.
-
3.
The virtual environment allows designers to make real-time adjustments and optimizations during the design process. By simulating different design parameters and solutions, designers can quickly understand the impact of each parameter on the final landscape, thereby making more appropriate design decisions.
-
4.
The virtual environment helps designers communicate more intuitively and clearly with customers and stakeholders. Designers can present design plans to customers in the form of virtual reality, and customers can understand design intentions through personal experience, thereby better communicating and reaching consensus.
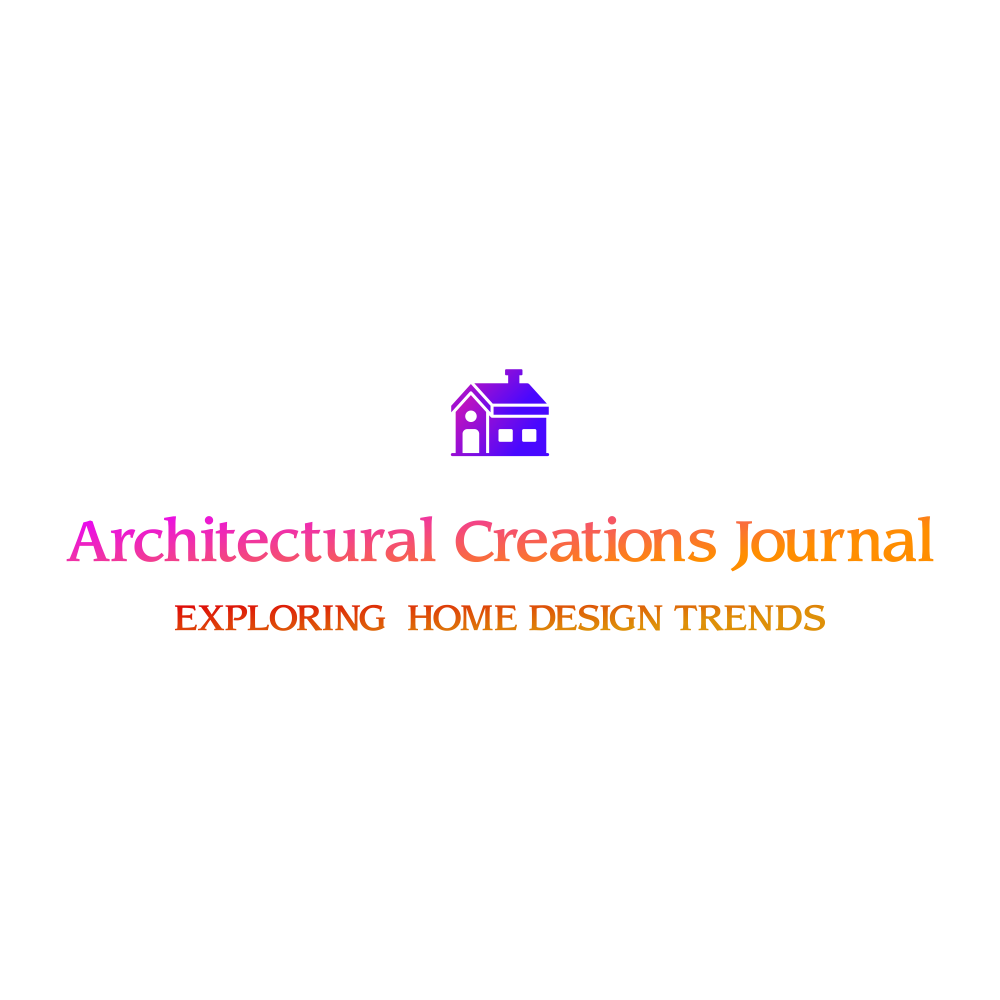
Virtual reality is a synthesis of computer graphics, browser engineering, inter-active devices and web solutions. The fundamental demand for virtual reality technology lies in the ability to engage with the user in real time37. Therefore, a base virtual reality system consists largely of a human computer, output and input equipment, software components and libraries. The composition of the virtual reality system is shown in Fig. 4.
Components of virtual reality system.
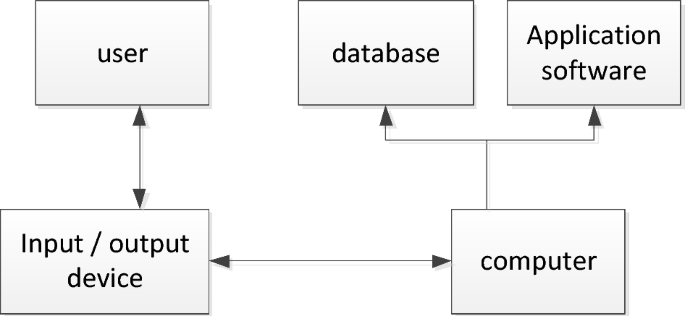
The computer is the carrier of the virtual reality world and the core of the entire virtual world. Its primary job is to be in charge of the virtual world creation and the handling of messages about the user’s engagement with the world. Input and output devices are the medium of interaction between the computer and the user. A database is a repository for all relevant information in the virtual world. In the virtual reality world scene, the large volume of available knowledge needs to be stored for use and this requires a library to keep track of the knowledge38. Application software is the key to realize the virtual environment, and its specific task is to be responsible for the production of models in the context of traditional virtual settings, and to guarantee the smoothness of human direct interaction with virtual reality contact. The virtual environment system structure is shown in Fig. 5.
Virtual environment system structure.
The virtual reality environment is an environment that exists inside the computer and needs to be felt with the help of some special equipment, which is generated by the computer by constructing geometric models and physical models. In this environment, it must have the function of real-time interaction with the user, and the user has absolute autonomy in order to be called a virtual reality environment39.
There is a strong demand for visualization technology in the field of urban planning. There is huge room for the use of virtual reality within the field of urban design. Taking benefit of the distinctive sense of immersed and responsive nature of this technology, virtual reality enables planning authorities, consultants, engineers, scientists, architects and general public to get a true picture of future outcomes from all angles. It can allow users to gain a better sense of the scale as well as the extent of a city’s plan, and it can enable clients to gain a better appreciation of design briefs and ideas. In the virtual environment, the nodes that are not ideal in the design plan are modified to facilitate the design, planning and management of large-scale projects. It is also beneficial for designers and managers to revise the design scheme and supplement the design later, find out design defects, and avoid design risks.
At present, many cities have their own future urban planning. In virtual reality, users can predict the actual effect of the construction in advance. Through this technology, it is possible to check whether the effect after completion is compliant and reasonable, and whether it is in harmony with the original architectural style, so as to prevent the original architectural style from being destroyed and the original urban layout being disrupted only after the actual project is implemented. The user observes in the virtual scene. Through human–computer interaction, the risks existing in the design can be found, the previous design defects can be reduced, and immeasurable losses can be avoided. At the same time, the design quality is improved and the construction process is accelerated. The application of virtual reality technology enables people to make modifications at will, such as changing the material of the building’s facade, and increasing or reducing the planting density of plants. Only the system parameters need to be modified in the whole process, which greatly speeds up the design progress, improves efficiency, and saves time and money.
link




